Themis
01/04/23
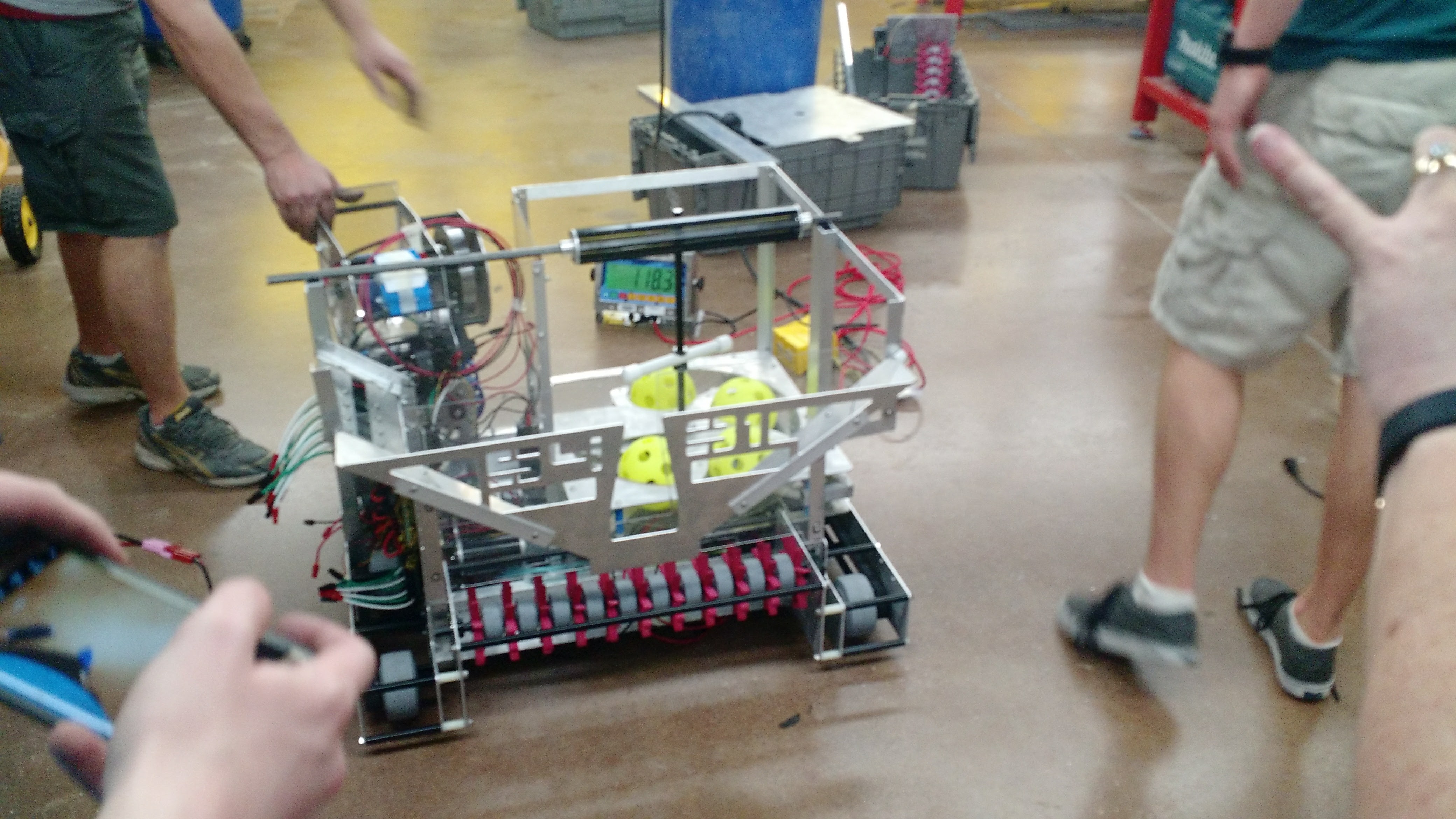
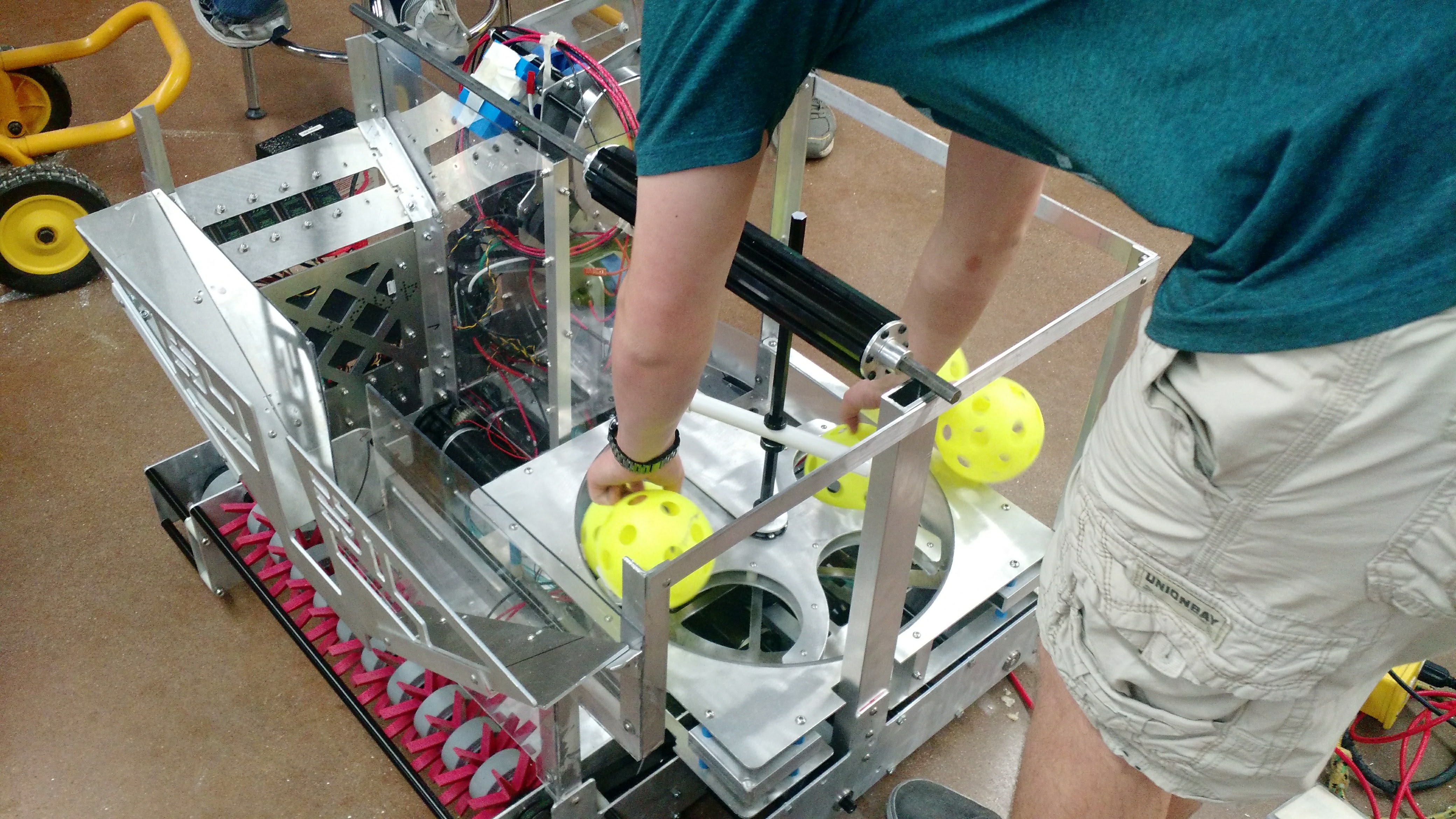
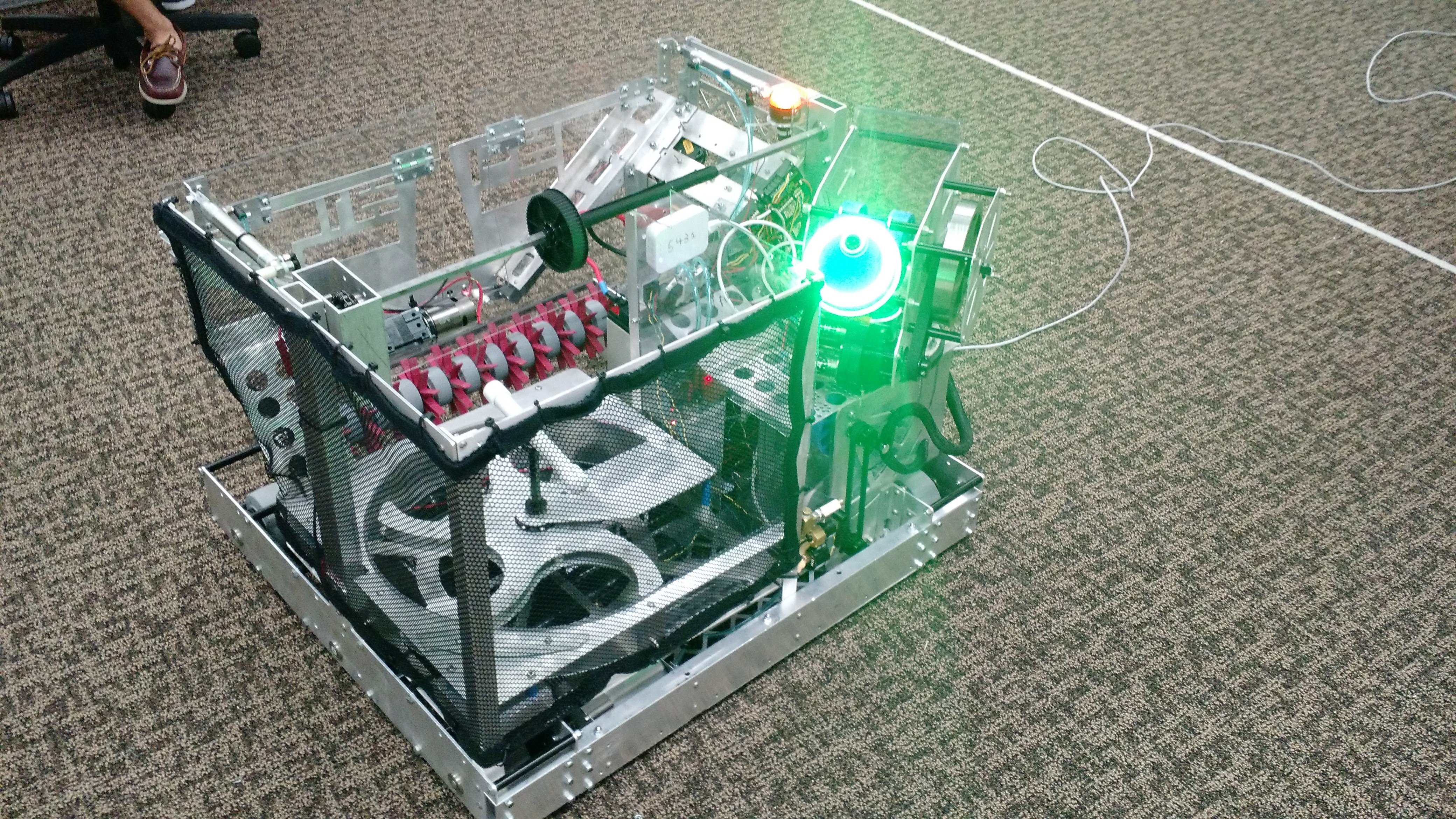
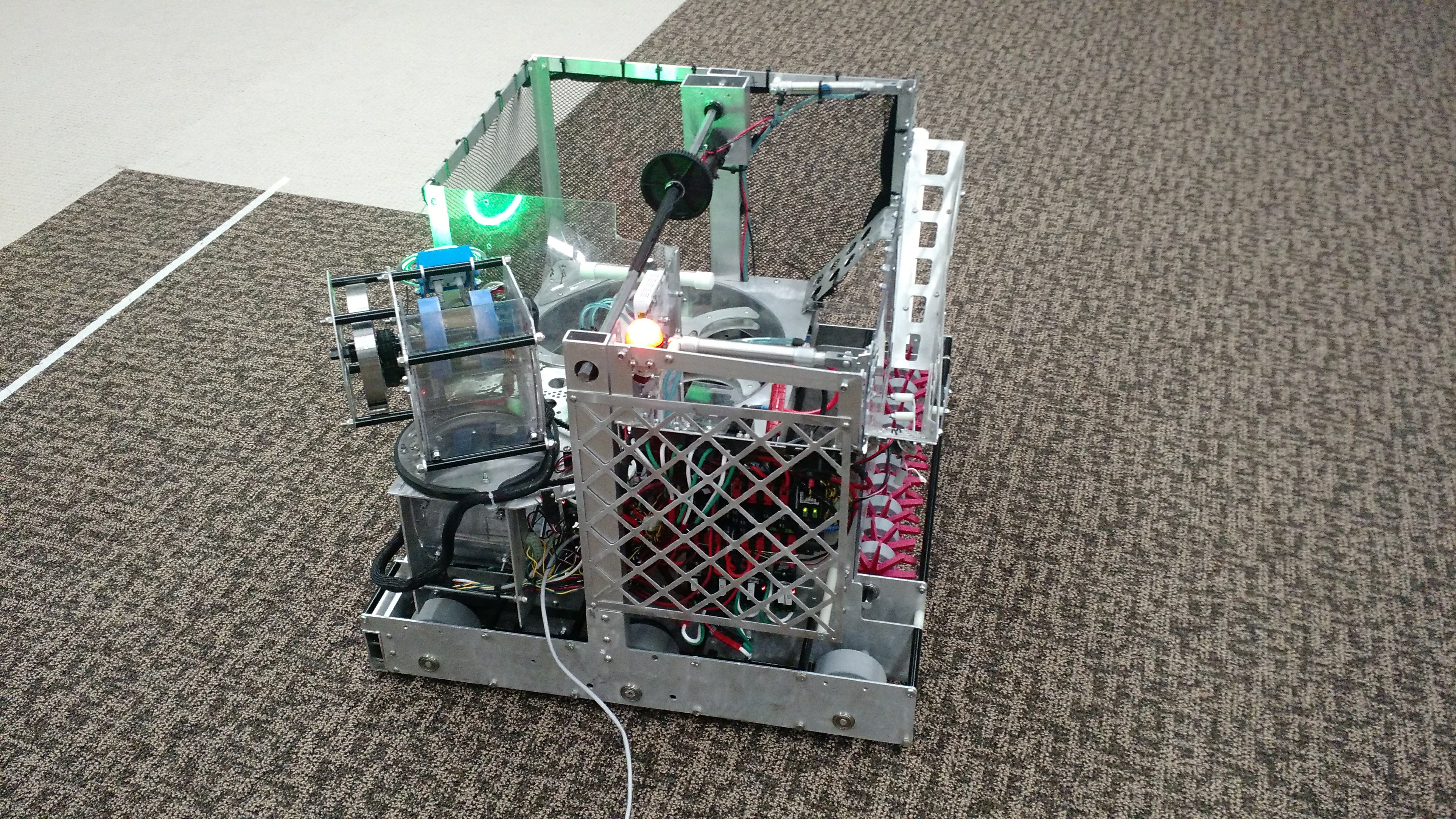
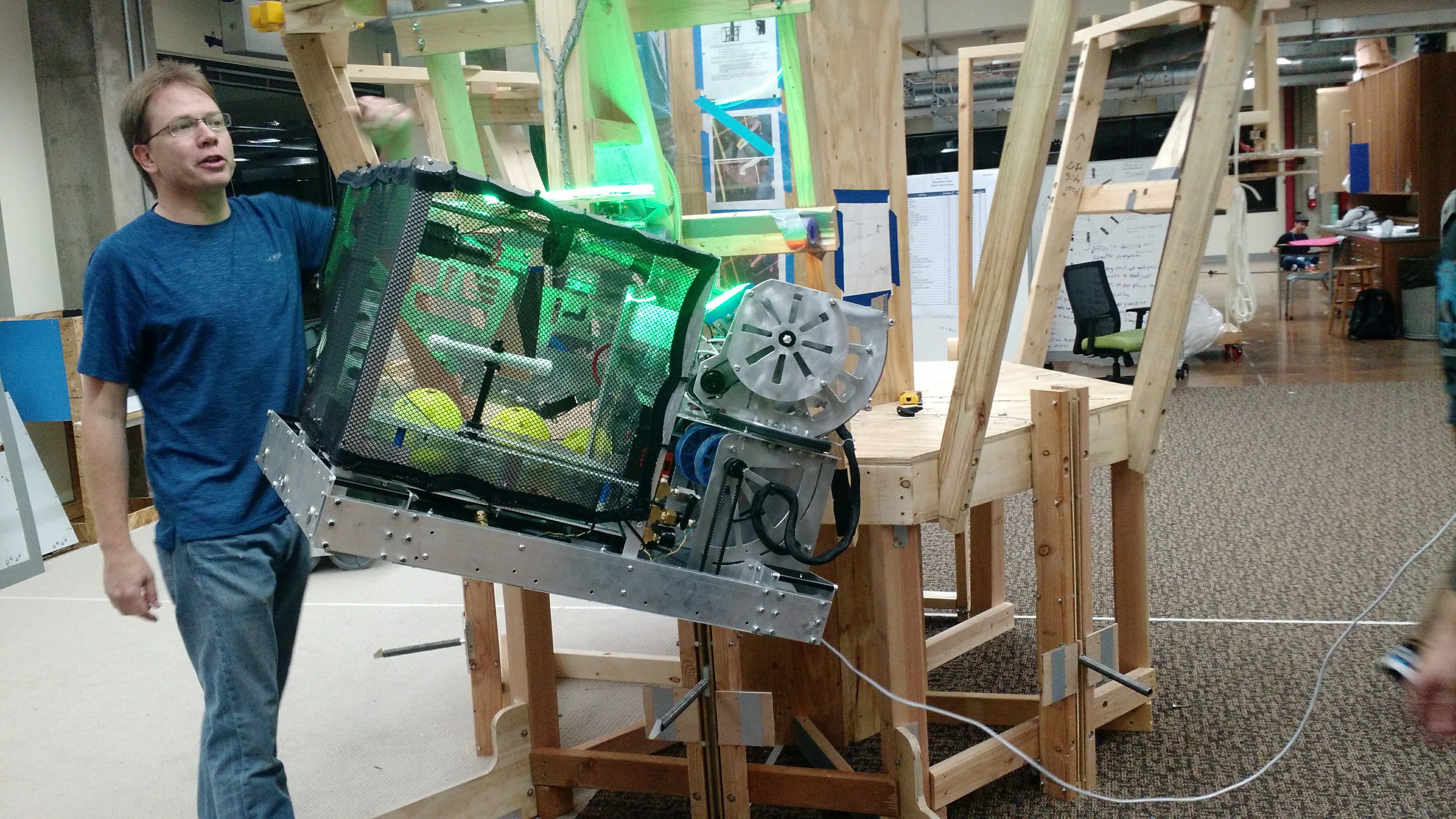
Themis was a robot which collected, autonomously aimed, and shot whiffle balls into a basketball hoop style goal. In addtion, it hung 1 foot diameter plastic gears onto hooks. I was heavily involved in the software side of the project, namely the computer vision.
Themis had a turret which we rotated to point at the goal at all times. Aided by OpenCV, we used HSV filtering and blob detection to guide the turret. Additionally, sensing distance from the goal was a concern because flyweheel RPM had to be adjusted accordingly. Using the size of the goal as perceived by the camera and the angle of the camera, we used a regression model to calculate the distnace from the goal.
Themis was never used in competition as the team pivoted to a different robot concept for the challenge: Thrice.
See the challenge themis was designed for
Gallery